
CAN GNSS (GPS)
With sensor fusion
Fuses GNSS with IMU for high accuracy
Built-in barometer and magnetometer
Plug and play with Ardupilot and PX4
RTK support with 1cm positional accuracy (Ublox NEO-F9P GNSS) coming soon. To join the waitlist,
send us an email.
Accelerometer range: ±16G
IMU/AHRS data: 1kHz
Power usage: 200mW
Angular resolution: 0.01°
Gyro drift: 0.005 rad/s
Position data: 1kHz
CAN datarate: 5Mbps
Fix rate: 10Hz
Magnetometer rate: 155Hz
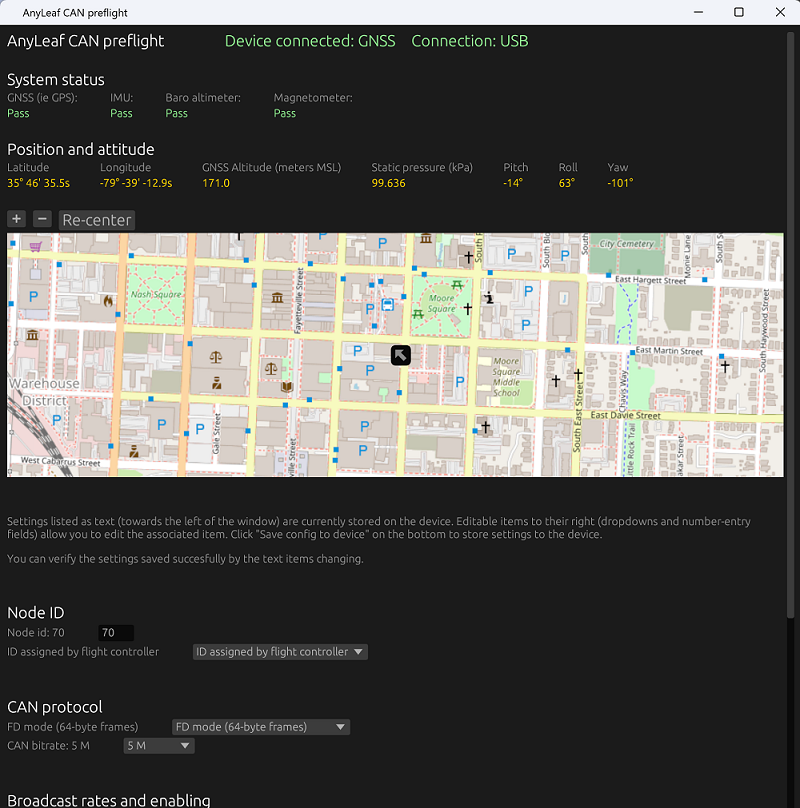
Position and attitude
This device fuses GPS and Galileo satellite data, outputting a position and velocity solution at 10Hz. It uses
a UBLOX M10 GNSS unit, and combines this with a magnetometer, barometer, and IMU for a complete
AHRS solution.
Perfect for decoupled systems
By outputting a complete position and attitude solution, your team is free to focus development
on what makes your system unique. Use it with all-in-one firmware like PX4 and AruPilot, or develop your own - the
IO, firmware, and fusing are taken care of. This device is suitable for a wide range of autonomous systems
and robotics.
Automatic calibration
Continuous magnetometer hard and soft iron calibration. Automatic gyro and accelerometer bias compensation. Additionally,
magnetic declination is determined automatically based on position.
High performance AHRS filtering
Fuses accelerometers, gyroscopes, magnetometers, and GNSS data for a consistent, high-fidelity
attitude and position solution. Uses each sensor's strengths to mitigate the others' weaknesses.
Plug and play with ArduPilot and PX4
Easy setup; uses standard DroneCAN messages for compatibility with the most popular flight controllers. Includes
a mounting stand.
CAN-FD ready
Supports up to 64-byte frames, and 5Mbps data rates. It's also compatible with classic CAN systems.
CAN allows for simplified wiring, and robust, interference-resistant connections.
A redundant attitude platform (AHRS) for safety-critical applications
If your primary IMU fails or becomes unreliable for any reason, the accelerometer,
gyro, and AHRS solution data from this device can be used to take over. Even if they're working properly,
this device provides an independent solution.
The bare PCB is easy to remove and mount; this is useful for compact builds.
Easy configuration
Data broadcast rate and number of channels are customizable, using the AnyLeaf Preflight software that connects with USB,
or through DroneCAN's parameter standard. Preflight is lightweight and easy to use: Download, launch, and plug the device
into your PC's USB port.
Sends the following messages:
- GNSS fixes with metadata
- Fused position and altitude
- Attitude and heading solution (AHRS)
- 3D Magenetometer (compass) readings
- Atmospheric pressure (For use as an altimeter)
- Raw IMU readings
- DroneCAN metadata
Perfect for commercial solutions and university projects
- Connect the device to your CAN system using the 4-pin DroneCAN cononector.
- If your flight controller is already configured for CAN, you're done
- If your flight controller isn't yet configured, open Mission Planner, and adjust these settings
under Config, Full Parameter List:
- CAN_P1_DRIVER = 1
- GPS_AUTO_CONFIG = 2
- GPS_TYPE = 9
Quickstart with PX4
- Connect the device to your CAN system using the 4-pin DroneCAN cononector.
- Set the UAVCAN_ENABLE parameter to a non-0 value.
Our firmware and preflight software are written in Rust, for maximum reliability.
Download the latest firmware update.
On Windows, run the updater application. On
Linux or Mac, flash the .bin file using the appropriate tool, like dfu-tool.
Specifications:
- Module dimensions: 49 × 49 × 17 mm. 70mm width with tabs
- Mounting holes: 2 × M4, spaced 60.4mm
- Weight: 28 grams
- Power: 5V, via CAN or USB
- MCU: STM32G431. 170Mhz Cortex-M4
- GNSS: Ublox M10
- Fix accuracy: 1m
- IMU: TDK ICM-42688p
- Barometer: Infineon DPS-310
- Magnetometer: ST LIS3MDL
- CAN tranceiver: NXP TJA1051TK/3
- CAN datarate: Configurable up to 5Mbps
- CAN frame size: 8 or 64-byte
- GNSS fix rate: Configurable up to 10Hz
- Fused position update rate: Configurable up to 1kHz
- AHRS and IMU data update rate: Configurable up to 1kHz
- Number of concurrent GNSS: 4
- CAN connections: 2 × JST GH
- Protocol support: DroneCAN
- Gyro drift rate (fused): < 0.005 rad/s


